绿色智能交通产品
管理创新、技术创新、产品创新
全国服务热线:
400-687-0312
绿色智能交通产品
管理创新、技术创新、产品创新
全国服务热线:
400-687-0312

维特瑞交通科技有限公司
◆ 联系电话
国内销售:
0312-5916377
0312-5916378
国际销售部:
+86-0312-5916386
网址:www.vtrjt.com
鸣笛抓拍系统的核心功能是通过声学定位技术捕捉违法鸣笛行为,其设计初衷并非专门用于“车型和颜色识别”,但在实际部署中,部分系统会集成辅佐视觉模块(如摄像头),从而具备一定的车型和颜色识别能力。以下从技术原理、实际表现和局限性三方面具体分析:
一、核心技术逻辑:声学为主,视觉为辅
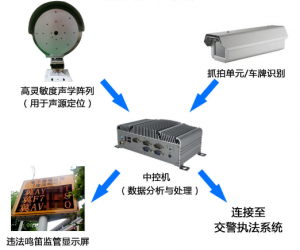
鸣笛抓拍系统的核心是“声源定位+车牌识别”:
声学定位:通过多个麦克风阵列(通常4~8个)采集鸣笛声波的时间差、相位差,计算出声源的准确位置(误差可控制在米级甚至亚米级);
车牌识别:联动现场的监控摄像头,对定位区域内的车辆进行车牌抓拍与识别,完成违法取证;
车型/颜色识别:并非所有系统都标配此功能,只当摄像头集成了AI视觉算法时,才会额外对车辆的“车型类别”(如轿车、SUV、货车等)和“外观颜色”进行分析。
二、车型和颜色识别的准确性表现
若系统集成了成熟的视觉模块,在理想条件下(如光线充足、车辆无遮挡、摄像头分辨率足够),识别准确率可达到较高水平:
车型识别:主流算法可区分常见车型(轿车、SUV、MPV、卡车、客车等),准确率通常在85%~95%之间;对于细分车型,准确率会下降;
颜色识别:对纯色车辆(如白色、黑色、红色)的识别准确率较高(90%以上),但对浅色系(如米白、浅灰)、金属漆(因反光变化)或双拼色的识别准确率可能降到70%~80%,恶劣光线(如逆光、夜间无补光)下误差更大。
三、主要局限性与影响因素
硬件依赖:需搭配高清摄像头(建议≥200万像素)和足够的算力支持(如边缘计算盒子),否则无法有效运行视觉算法;
环境干扰:夜间无红外补光、暴雨/雾霾遮挡、车辆被其他物体(如树木、护栏)遮挡时,视觉识别效果骤降;
数据标注限制:训练算法的车型/颜色数据集若覆盖不全(如特殊车型、小众颜色),会导致识别盲区。
结论
鸣笛抓拍系统可以识别车型和颜色,但准确性取决于是否集成视觉模块及环境条件:
若只需基础车型分类(如“轿车vs货车”)和常见颜色识别,在常规场景下基本可用;
若需高精度细分车型或小众颜色识别,则需专门优化的智能交通监控系统,而非普通鸣笛抓拍系统。
简言之,鸣笛抓拍系统的“车型/颜色识别”是辅佐功能,而非核心能力,实际应用中需结合具体系统的配置和场景判断可靠性。

 公司地址:
公司地址: 公司电话:
公司电话: 邮箱:
邮箱: